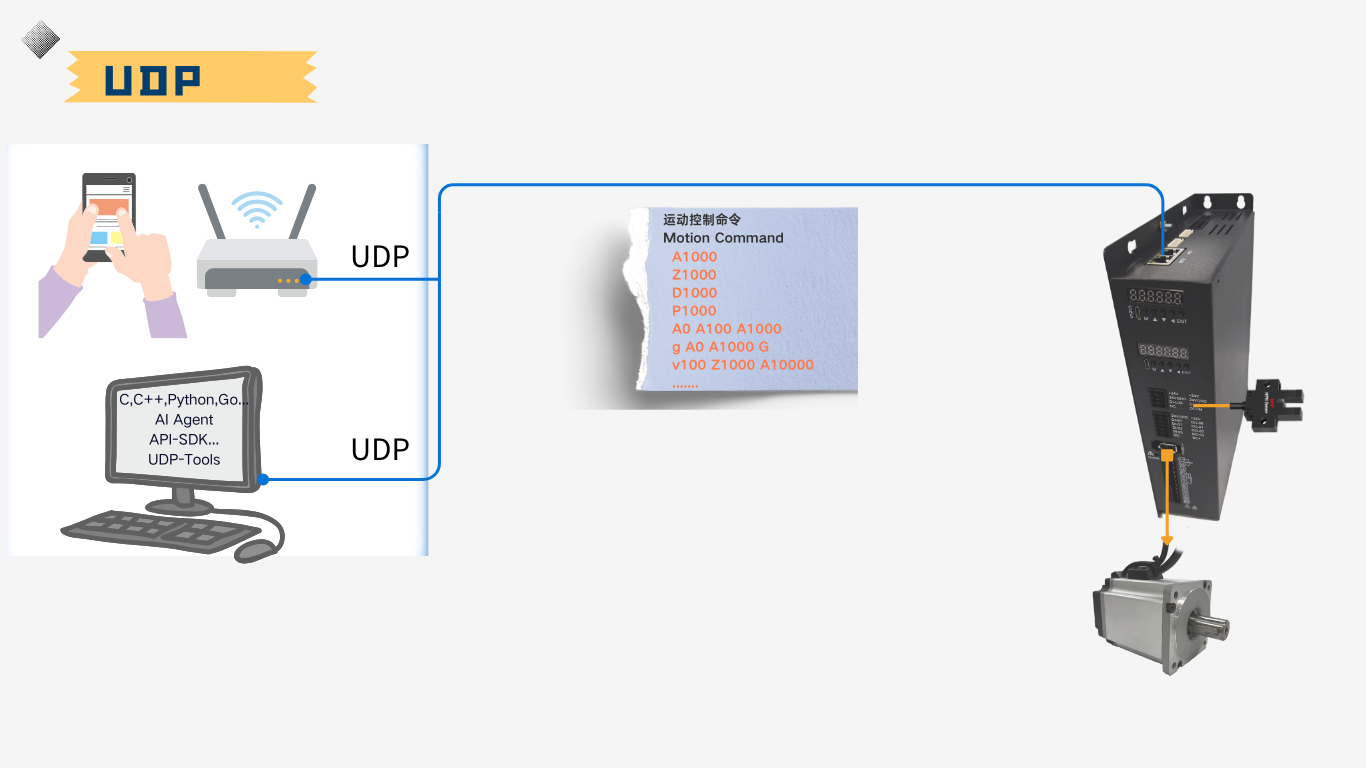
单轴-应用示意图
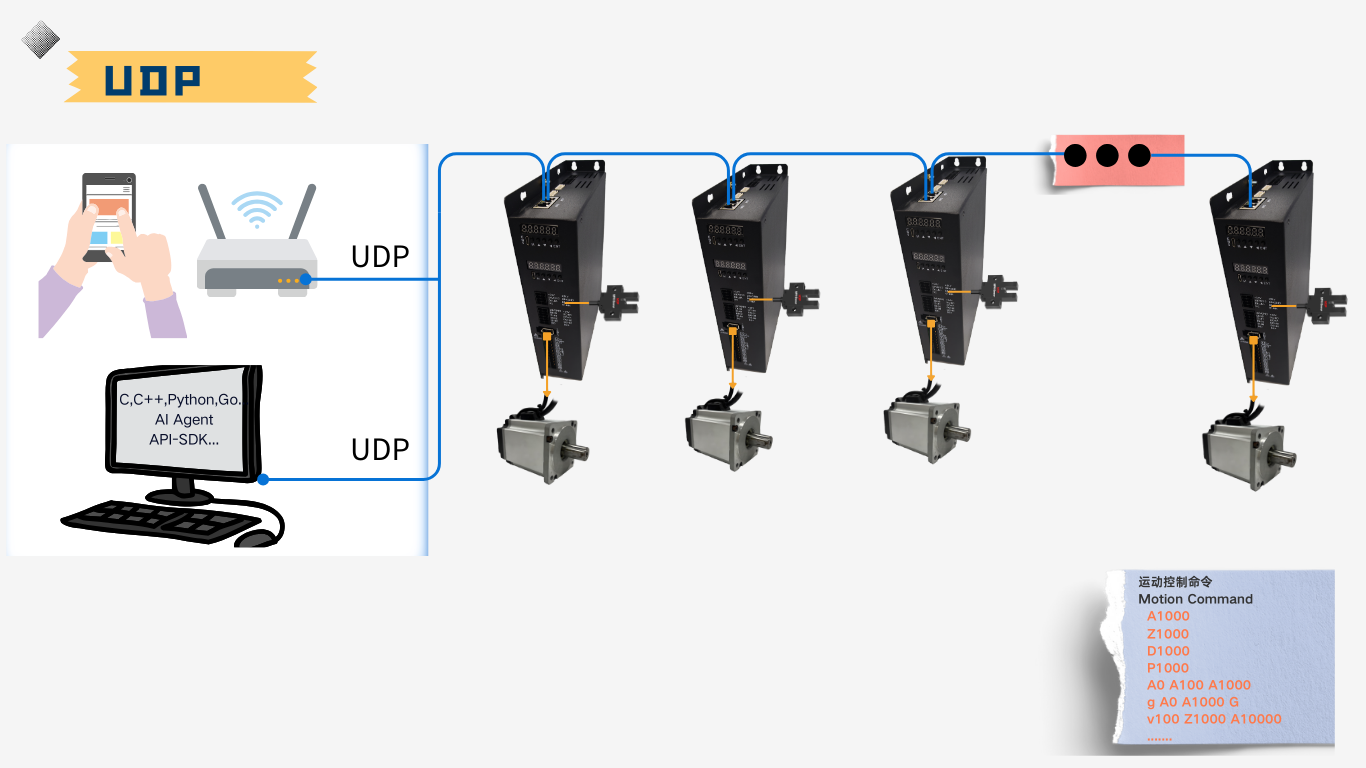
多轴级联-应用示意图
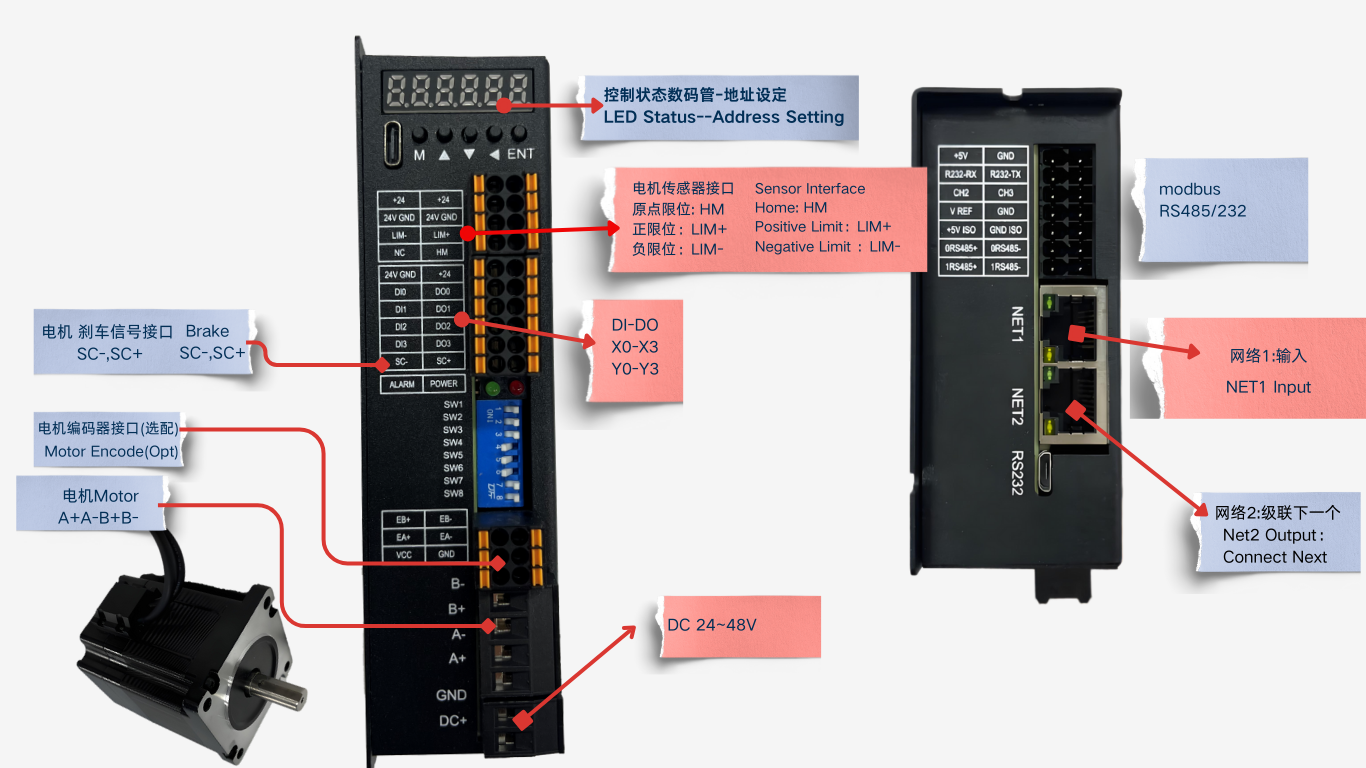
步进ST驱动器-接口
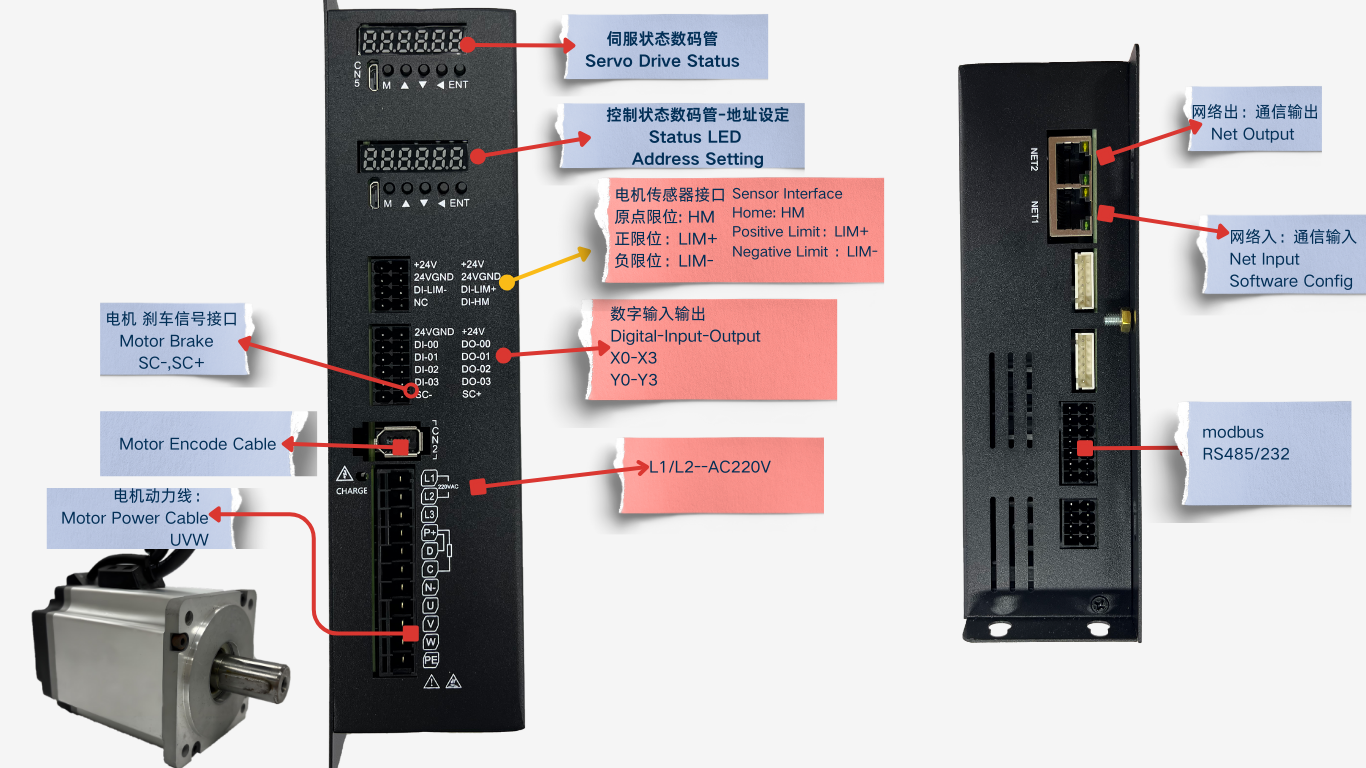
伺服SV驱动器-接口
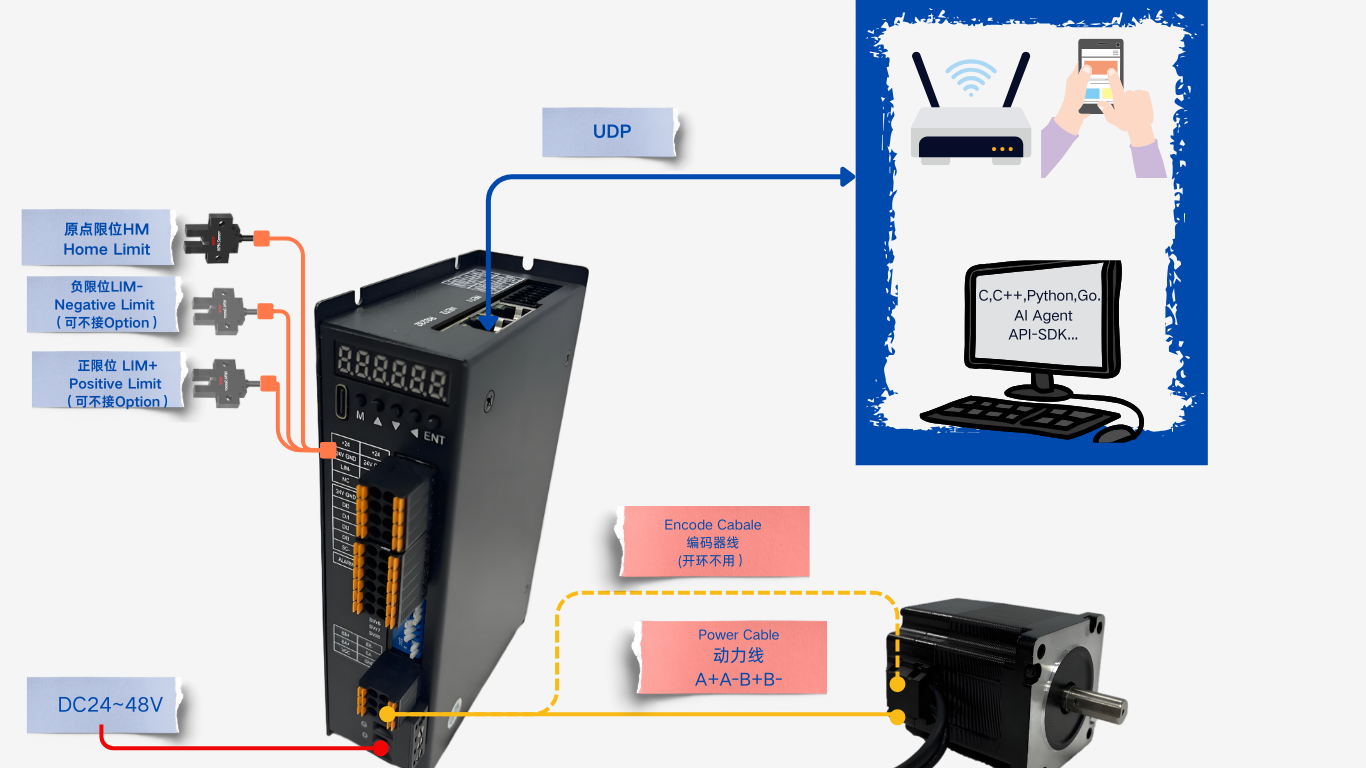
步进ST驱动器-最小系统
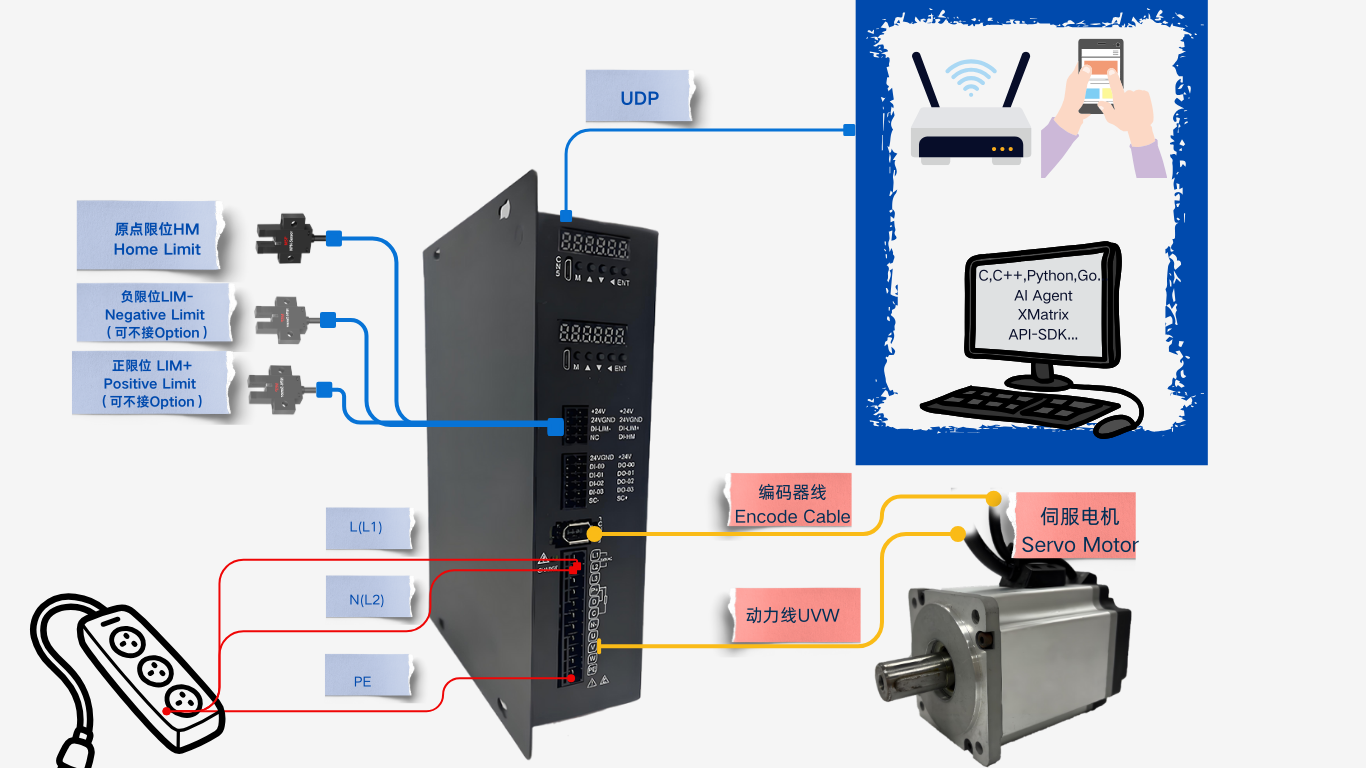
伺服SV驱动器-最小系统
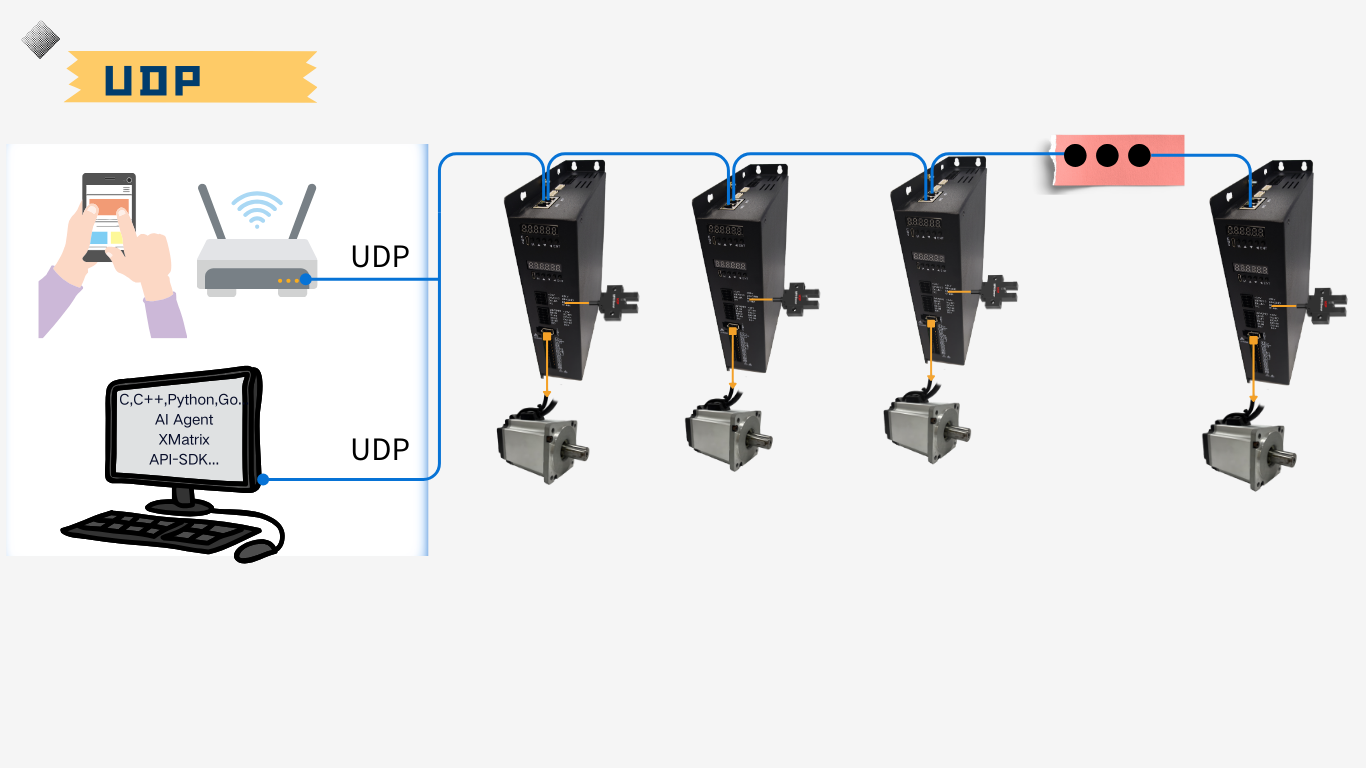
单网络级联
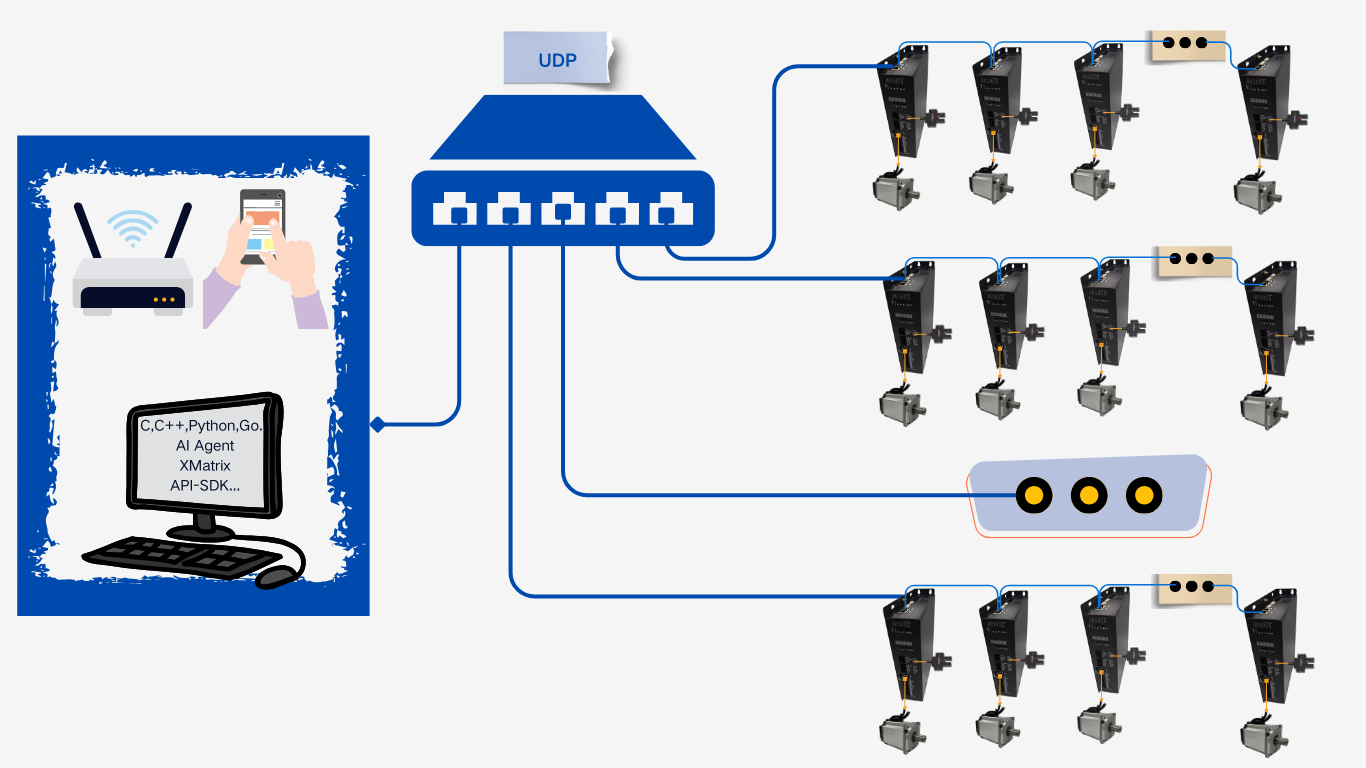
多级级联

应用案例
UDP步进驱动器 | UDP伺服驱动器 | UDP伺服电机 | UDP步进电机 | 集成运动控制算法
释放自动化力量,赋能每一行代码,告别重复劳动。
它能做什么?
通过UDP接口,进入强大而直观的运动控制命令解释器,实现运动控制命令编程、代码调用,完成灵活的动作,将繁琐任务自动化,构建复杂工作流,将您的效率提升至全新高度。让您忘掉电机参数,驱动器参数、运动控制器的琐碎细节。
快速命令
- A: 绝对位置移动。A10000,表示电机移动到绝对位置10000脉冲位置
- D: 电机负方向相对移动指令。D1000,电机在当前位置,向负方向移动1000脉冲
- P: 电机正方向相对移动指令。P1000,电机在当前位置,向正方向移动1000脉冲
- V:指定电机移动速度,单位RPM。V1000A1000,表示以1000RPM速度,移动到1000脉冲位置
- Z:回零指令。Z100,表示电机开始寻找原点限位,并且找到后偏移100脉冲,当做当前原点0点
- v:回零速度。v100 Z2000表示以100RPM速度回零,当回零完成,偏移2000脉冲,当做电机0点
- z: 电机不移动的情况下,强制设置当前电机位置。z100,表示设置当前电机位置为100脉冲。
- /:电机地址指令。/0 A0 /1 A100 /2 A200 表示0号电机移动到0,1号电机移动到100,2号电机移动到200(多电机级联用)
- …还有更多
代码示例
- A0 A1000 电机 移动到0再移动到1000,一次
- g A0 A1000 G100 电机 移动到0在移动到1000,循环10次
- g A0 A1000 G 电机 移动到0在移动到1000,一直循环
- A0 W1000 A1000 W500 电机 移动到0 等待1000ms,再移动到1000,等待500ms
- v100 Z1000 以100RPM速度回零。回零偏移为1000。
- v100 Z1000 V500 A1000 以100RPM速度回零,回零偏移为1000,回零完成,以500RPM速度移动到1000
- /0 A0 /1 A100 /2 A200 表示0号电机移动到0,1号电机移动到100,2号电机移动到200
- 更多例子,请联系我们….

正文开始
基于UDP协议步进驱动器、伺服驱动器,为行业提供强大、灵活、可靠的电机驱动控制解决方案,解决传统步进电机、伺服电机,“控制兼容性差”“功能固定”“接线复杂““需外置控制器”“调试复杂”等痛点。
驱动器内置UDP协议,降低接线调试门槛。不需外置控制器,不用考虑不同品牌驱动器兼容性
硬件载体
功能特点
典型用法
单个
多个
产品定位
完美地将工业级的运动控制精度、运动控制命令解释器、UDP协议相结合,集成运动控制算法,不用PLC,灵活选用各种软件平台完成电机控制。
核心价值
详细功能特点阐述
- 卓越的运动控制性能
- 集成运动控制算法,支持S/T加减速。支持急停和减速停止。支持对称加减速,支持非对称加减速曲线。
- 绝对位置移动,相对位置移动,Jog速度移动,支持关联移动。
- 原点限位,正限位,负限位,确保机械防护。
- 软件限位保护、事件触发停止保护,最大速度限制。
- 支持多种回零模式
- 光电传感器回零
- 绝对值编码器回零(伺服系统)
- 力矩回零
- 跳开回零
- 非标定制回零
- 针对不同的机械结构,采用合适的回零模式
- 先进的软件与可维护性
- 支持在线升级,通过网络接口,即可轻松完成固件升级。无需拆卸设备,即可获得最新功能和性能优化,未来无忧。
- 强大的软件DIY功能
- 我们提供友好的PC配置软件,允许用户深度自定义电机参数(如微步分辨率、电流、加速度曲线)、回零模式、DMX通道分配、模式映射等。
- 高级用户可通过提供的协议接口进行二次开发,实现完全定制化的控制逻辑。
- 广泛的兼容性与灵活性
- 步进ST系列:支持广泛的供电电压范围(24V-48V DC),可适配从NEMA17到NEMA34等各种尺寸的42、57、60、86步进电机,为您提供极大的项目设计灵活性。覆盖中小功率场景
- 伺服SV系列:AC220V、AC110V供电,可适配100W.200W.400W.750W.1000W.1500W伺服电机,为您提供极大的项目设计灵活性。覆盖中小功率场景
- 单轴控制MC系列,支持第三方驱动器、电机,支持步进,支持伺服,支持任意功率规格
- UDP协议全面兼容
- 全面支持UDP协议
- 支持控制器手拉手级联,支持路由器、交换机完成更大规模级联。
- 内置运动控制命令解释器,接受高效简易的UDP控制命令
- A 绝对位置移动命令A10000
- D:相对负移动命令 D10000
- P 相对正移动命令 P100
- T 停止命令
接口定义
ST步进驱动器
SV伺服驱动器
最小系统
ST步进驱动器
SV伺服驱动器
单网络级联
多网络级联
规格表 (Specifications)
控制协议: UDP
运动控制协议:运动控制命令解释器
电机类型: 步进、伺服
控制模式: UDP字符串命令(运动控制快速命令)
通信接口:Ethernet
保护功能: 过流、过压、欠压、短路保护
工作温度:0~70°C
冷却方式:自然冷却或强制冷风
使用场合:尽量避免粉尘、油雾及腐蚀性气体
储存温度:-20°C~80°C
技术特点 (Technology)
相关资料
| *为增值选型,需要确认订货编号 | 电机 | 开环 | 闭环 | 最大速度RPM | 典型力矩NM | 记忆编码器 | 刹车控制 | 输入输出 | 以太网/udp/tcp/raw | 232/485接口 | 在线升级固件 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| ST系列 | 步进版 | ||||||||||
| MSP-UDP-ST-42 | 42 | √ | √ | 300~1000 | 0.5 | – | √ | 4+4 | √ | √ | √ |
| MSP-UDP-ST-57 | 57 | √ | √ | 300~1000 | 2 | – | √ | 4+4 | √ | √ | √ |
| MSP-UDP-ST-60 | 60 | √ | √ | 300~1000 | 3 | – | √ | 4+4 | √ | √ | √ |
| MSP-UDP-ST-86 | 86 | √ | √ | 300~1000 | 8.5 | – | √ | 4+4 | √ | √ | √ |
| SV系列 | 伺服版 | ||||||||||
| MSP-UDP-SV-100 | 100W | – | √ | 3000 | 0.32 | ||||||
| MSP-UDP-SV-200 | 200W | – | √ | 3000 | 0.64 | √ | √ | 4+4 | √ | √ | √ |
| MSP-UDP-SV-400 | 400W | – | √ | 3000 | 1.27 | √ | √ | 4+4 | √ | √ | √ |
| MSP-UDP-SV-750 | 750W | – | √ | 3000 | 2.39 | √ | √ | 4+4 | √ | √ | √ |
| MSP-UDP-SV-1000 | 1000W | – | √ | 3000 | 3.18 | √ | √ | 4+4 | √ | √ | √ |
| MSP-UDP-SV-1500 | 1500W | – | √ | 3000 | 4.77 | √ | √ | 4+4 | √ | √ | √ |
| MC系列 | 单轴控制器 | ||||||||||
| MSP-UDP-MC-1001 | 外置驱动器 | – | – | – | – | * | * | 4+4 | √ | √ | √ |
*为增值选型,需要确认
| 开放参数 | ST步进系列 | SV伺服系列 | MC控制器系列 |
|---|---|---|---|
| 电机方向 | √ | √ | √ |
| 最大位置 | √ | √ | √ |
| 回零速度 | √ | √ | √ |
| 回零后偏移 | √ | √ | √ |
| 加减速曲线 | S/T | S/T | S/T |
| 非对称加减速 | √ | √ | √ |
| 最大速度限制 | √ | √ | √ |
| 回零方式 | 限位回零 堵转回零 跳开回零(旋转运动) | 限位回零 绝对值回零 堵转回零 跳开回零(旋转运动) | 限位回零 跳开回零(旋转运动) 绝对值回零* 堵转回零* |
| 力矩限制 | – | √ | * |
| 遇到错误处理 | 停机; 重启; 复位; | 停机; 重启; 复位; | 停机; 重启; 复位; |
| 正负限位警报 | √ | √ | √ |
| 支持外置驱动器 | – | – | √ |
| 软件更改电流 | √ | – | – |
| 输入输出IO点滤波 | √ | √ | √ |
| 急停方式 | 急停/减速停止 | 急停/减速停止 | 急停/减速停止 |
| 顺序回零 | √ | √ | √ |
| 正向移动前、负向移动前延迟 | √ | √ | √ |
| 绝对值编码器 | – | √ | * |
| 内置modbus 主站 (读外设传感器)* | * | * | * |
| 远程升级 | √ | √ | √ |
*为增值选型,需要确认