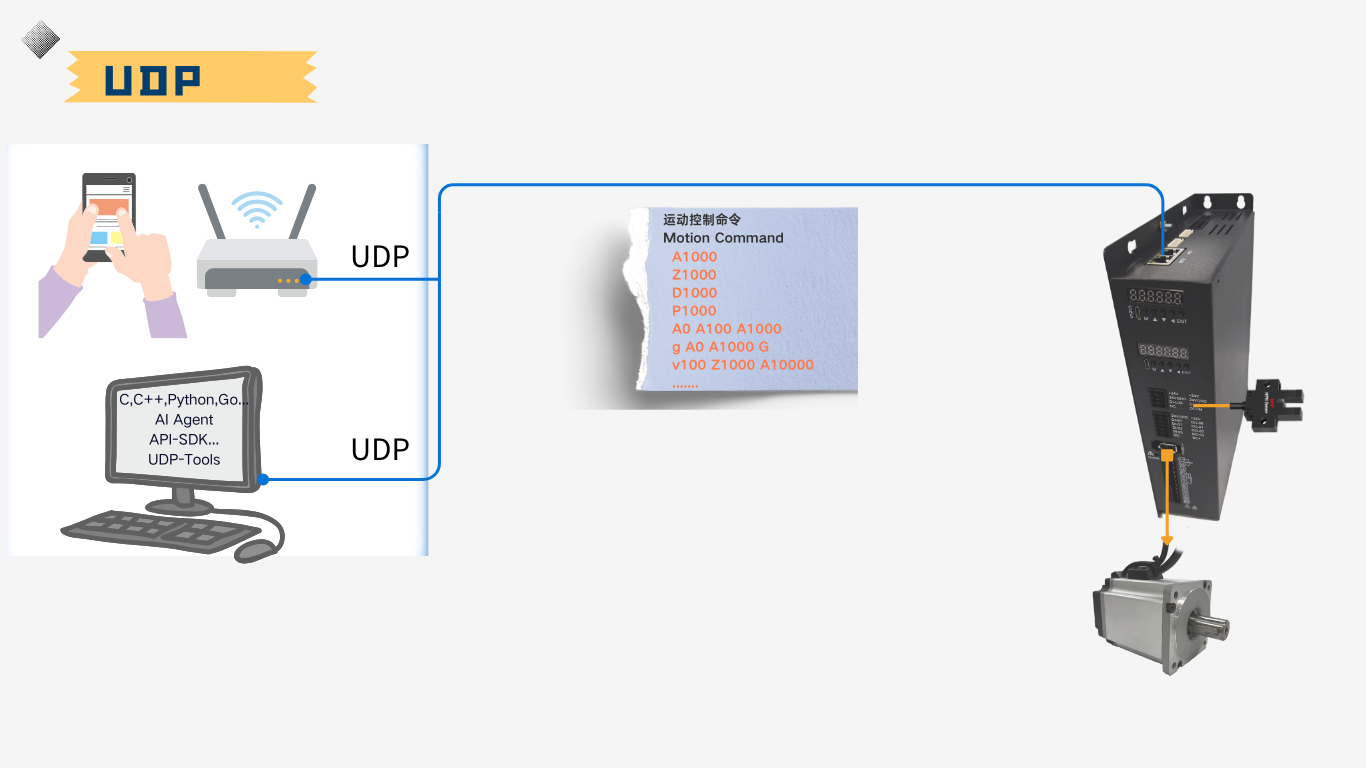
Single Axis Application
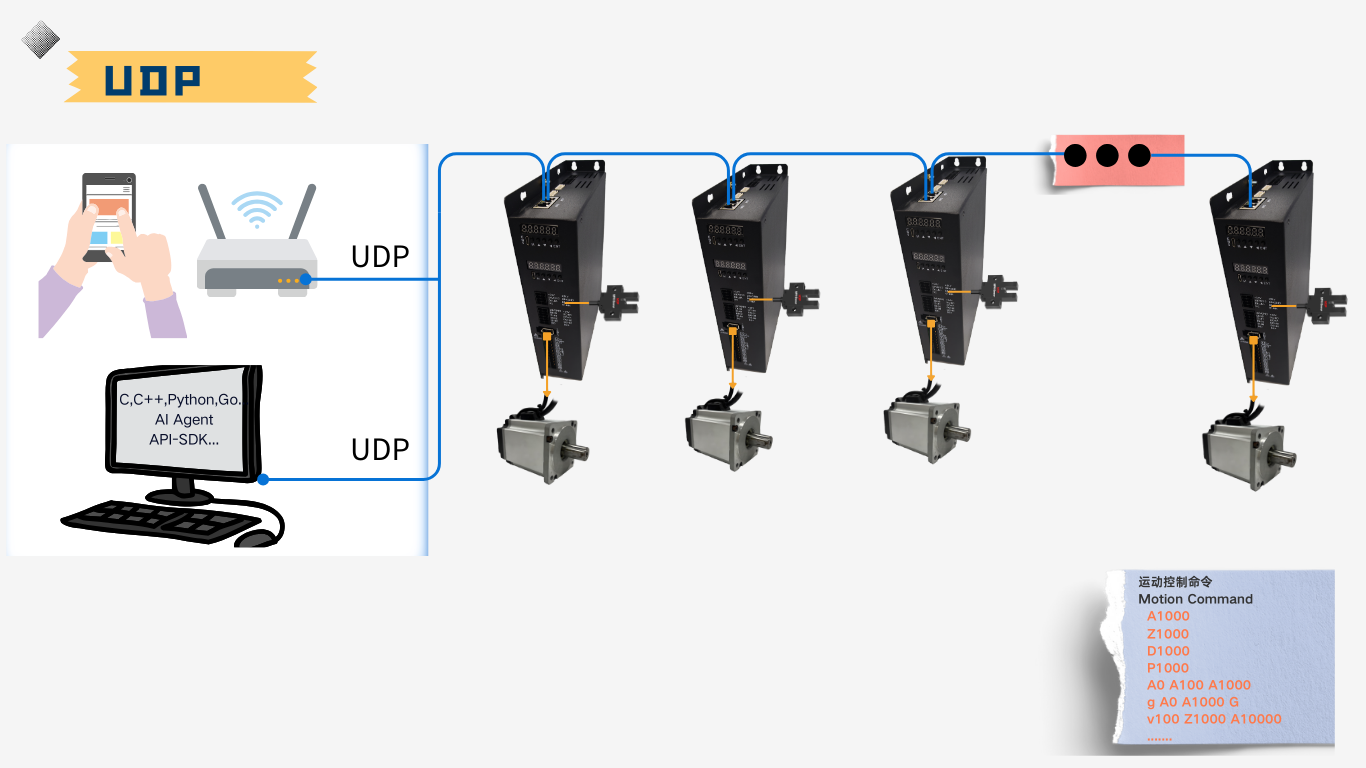
Multiple Axis Application
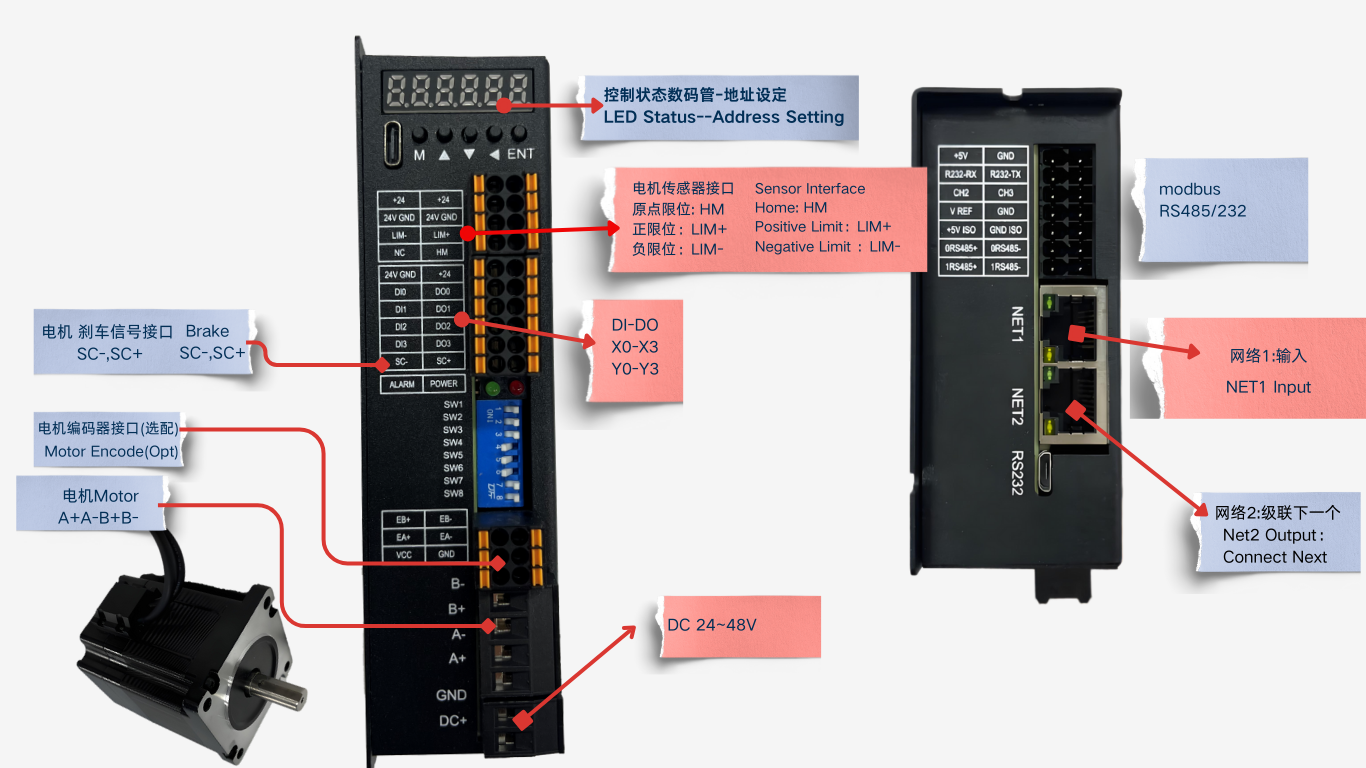
ST-Stepper Drive Controller Interface
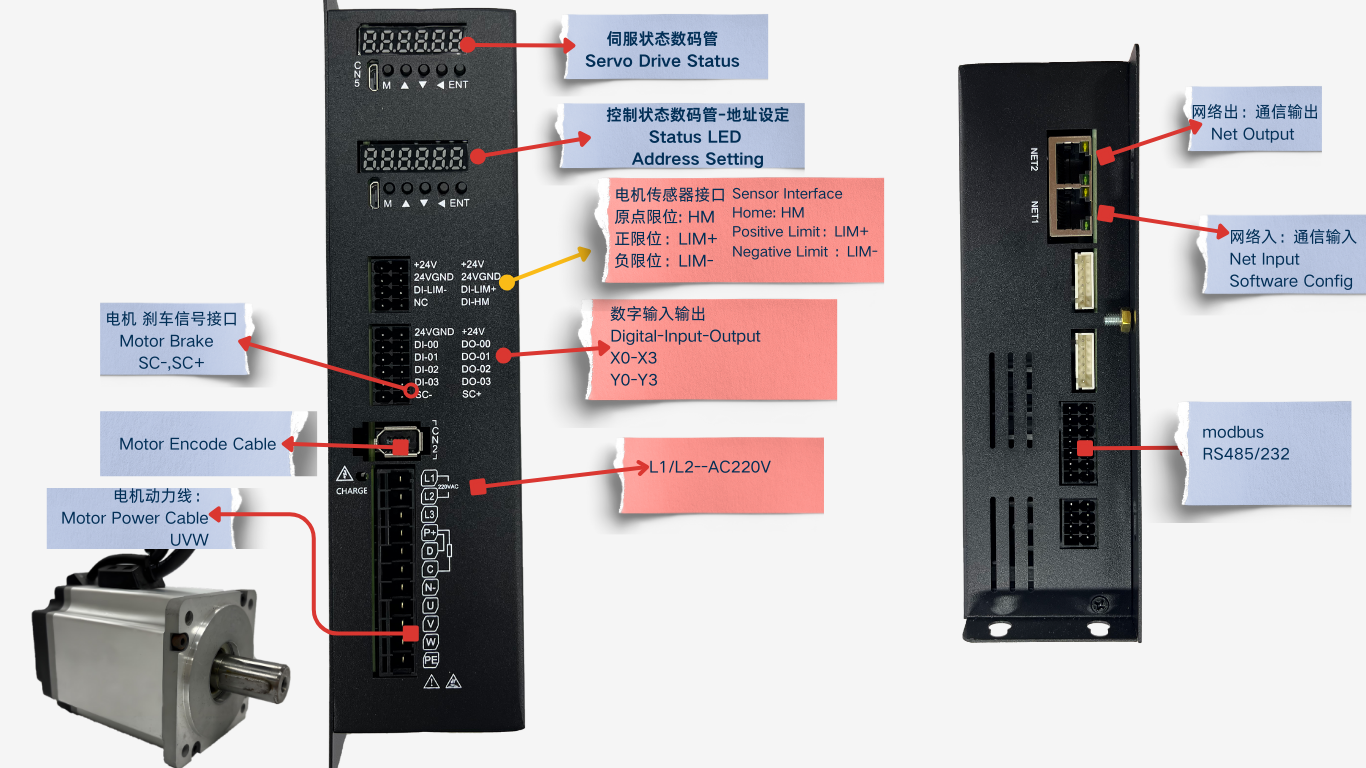
SV-Servo Drive Controller Interface
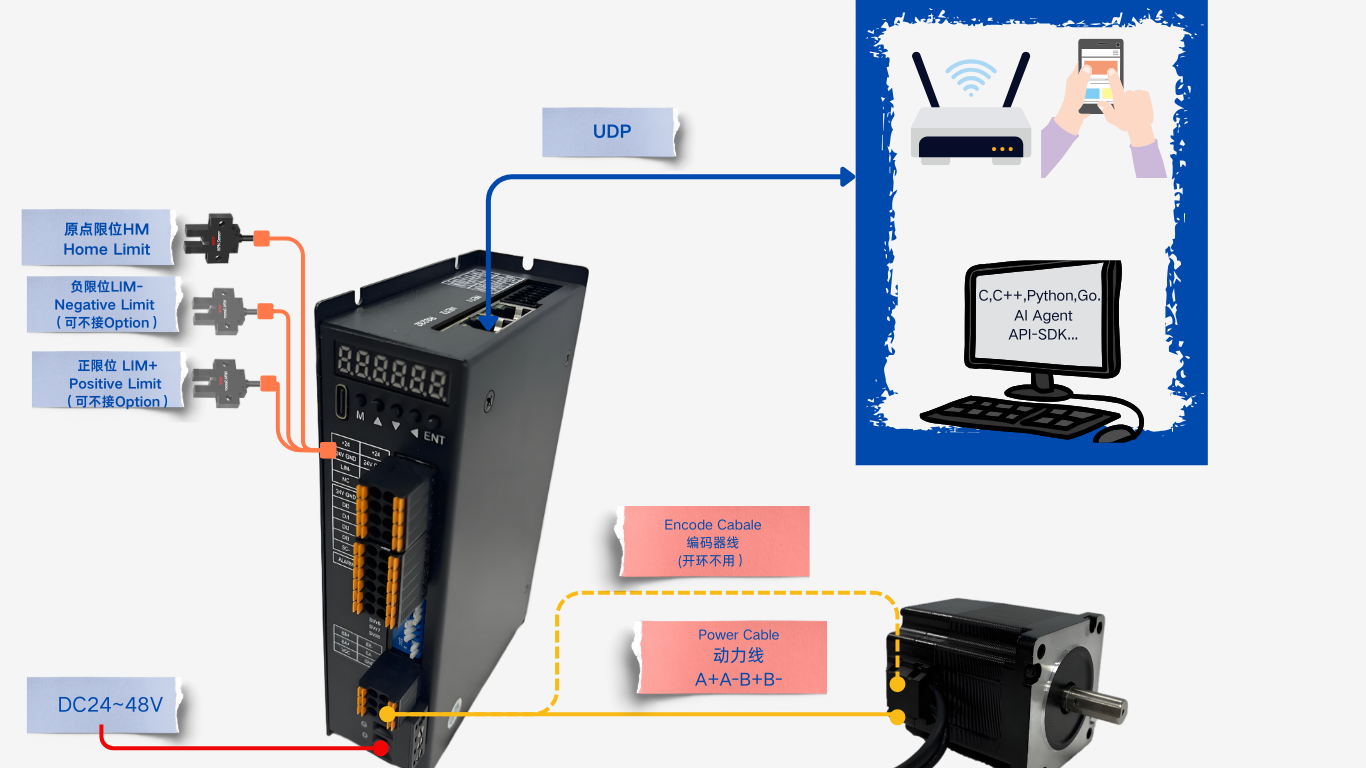
ST-Stepper Drive Controller Minimum System
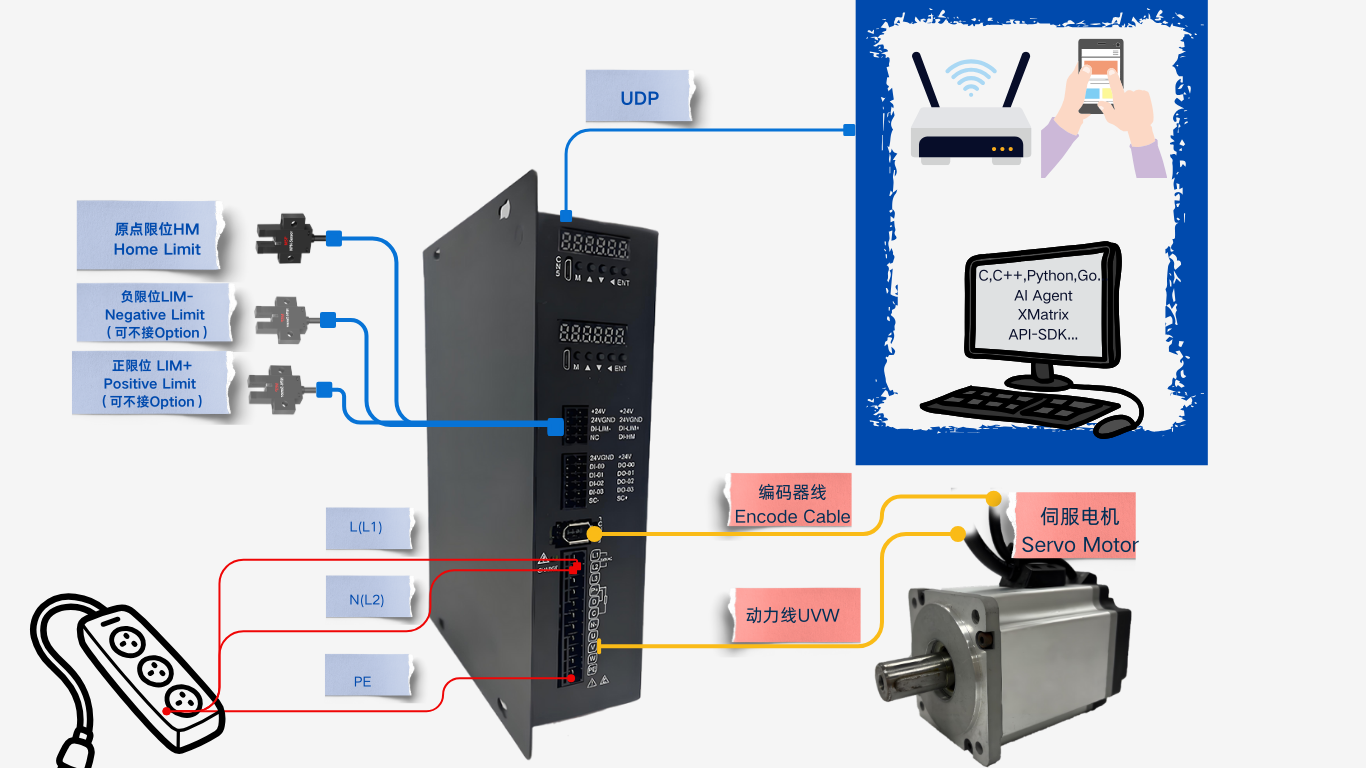
SV-Servo Drive Controller Minimum System
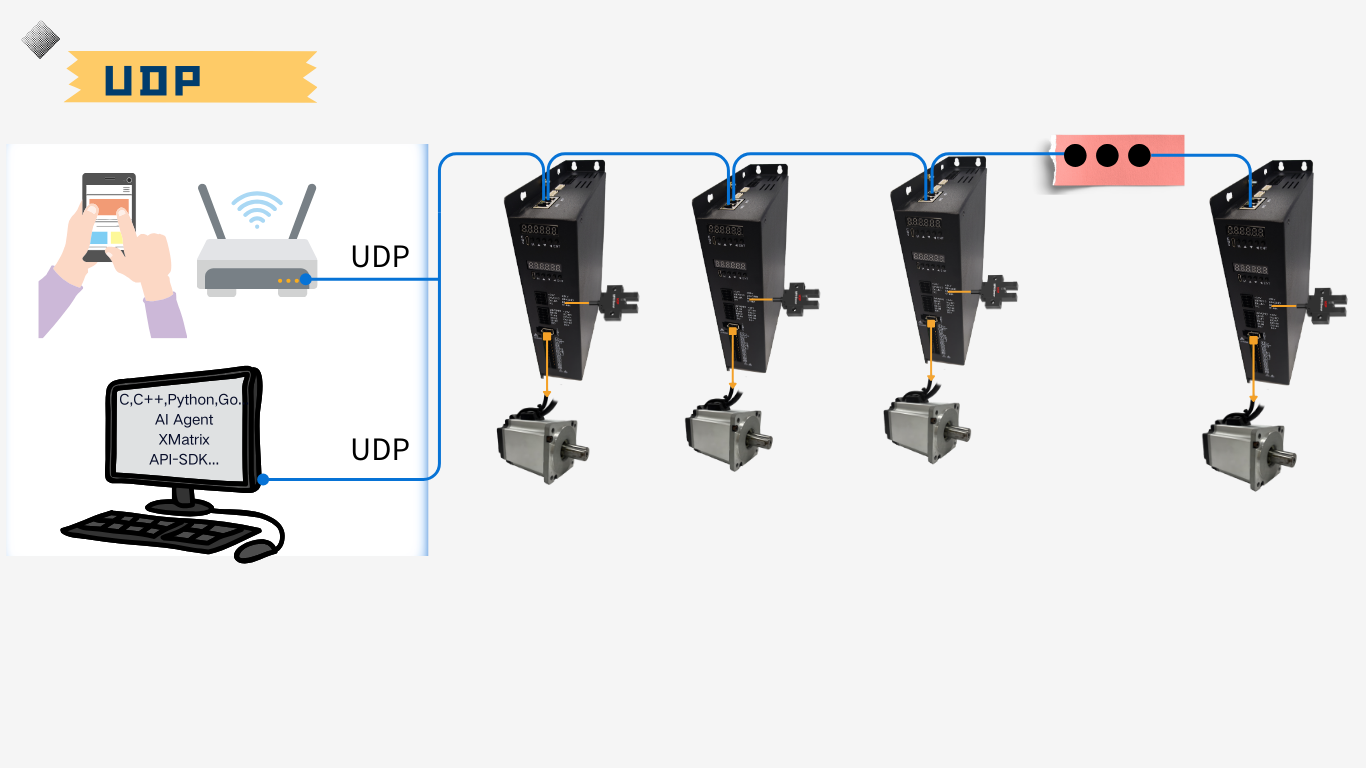
Single NetWork Connection
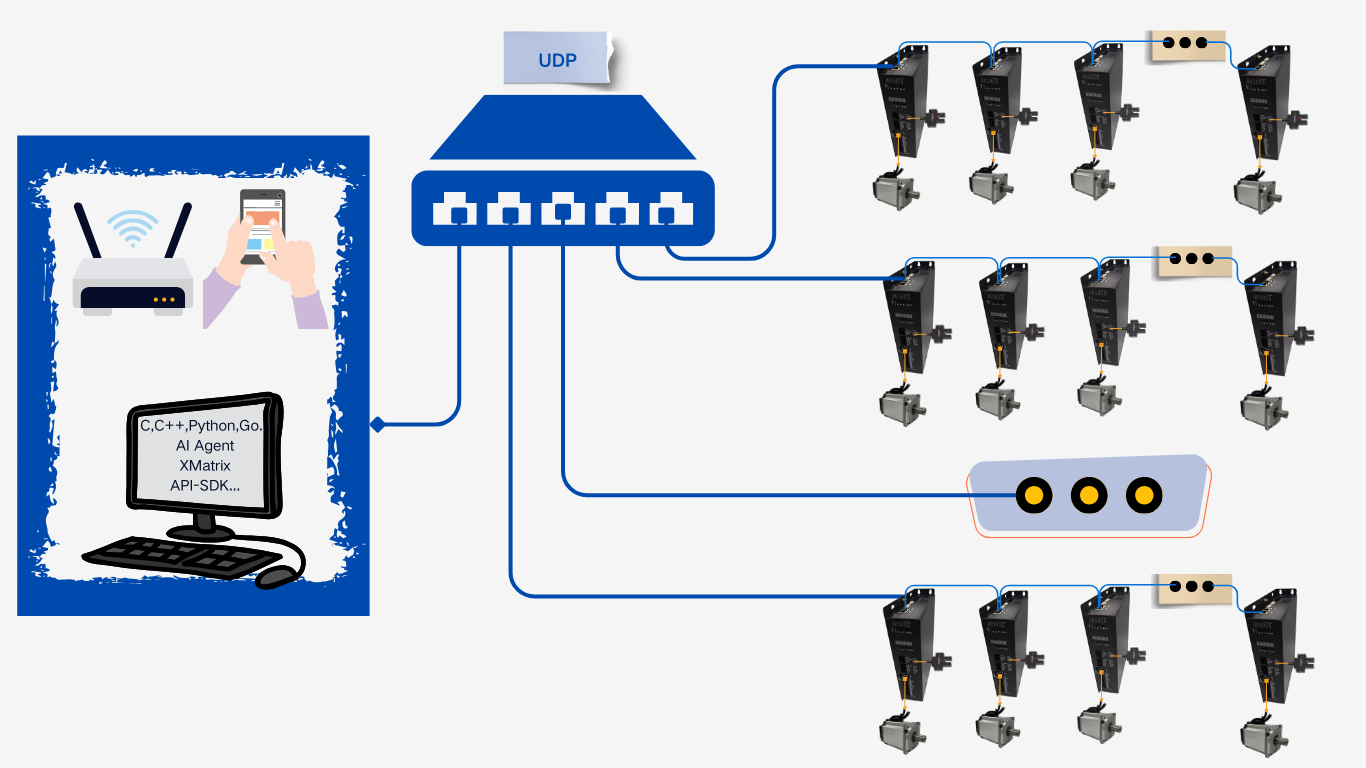
Multiple NetWork Connection

Application
UDP Stepper Drive Controller| UDP Servo Drive Controller| UDP Motion Controller | Integrated Motion Control Algorithm | UDP Stepper Motor | UDP Servo Motor
Unleash the power of automation, empower every line of code, and bid farewell to repetitive labor.
What Can It Do?
Through the UDP interface, enter a powerful and intuitive motion control command interpreter to program and call motion control commands, complete flexible actions, automate tedious tasks, build complex workflows, and improve your efficiency to new heights. Let you forget the trivial details of motor parameters, driver parameters, and motion controllers.
Fast Command
- A: Absolute position movement. A10000, Indicates that the motor has moved to the absolute position of 10000 pulses
- D: Motor negative direction relative movement command. D1000, The motor moves 1000 pulses in the negative direction at the current position
- P: Command for relative movement in the positive direction of the motor. P1000, The motor is in its current position, moving 1000 pulses in the positive direction
- V: Specify the motor movement speed in RPM. V1000A1000, Move to the 1000 pulse position at a speed of 1000 RPM
- Z: Return to zero instruction. Z100, Indicates that the motor is starting to search for the origin limit, and after finding it, it is offset by 100 pulses as the current origin 0 point
- v: Return to zero speed. V100 Z2000 means returning to zero at a speed of 100RPM. When the return to zero is completed, offset by 2000 pulses, it is considered as the zero point of the motor
- z: Forcefully set the current motor position when the motor is not moving. z100, Set the current motor position to 100 pulses.
- /Motor address command. /0 A0/1 A100/2 A200 means that motor 0 moves to 0, motor 1 moves to 100, and motor 2 moves to 200 (for multi motor cascading)
- … there are more
Code Sample
- A0 A1000 motor moves to 0 and then to 1000, once
- g A0 A1000 G10 Motor moves to 0 and then to 1000, repeating 10 times
- g A0 A1000 G motor moves to 0 and then to 1000, continuously cycling
- A0 W1000 A1000 W500 motor moves to 0 and waits for 1000ms, then moves to 1000 and waits for 500ms
- V100 Z1000 returns to zero at a speed of 100RPM. The zero offset is 1000.
- V100 Z1000 V500 A1000 returns to zero at a speed of 100RPM, with a zeroing offset of 1000. The zeroing is completed and moves to 1000 at a speed of 500RPM
- /0 A0/1 A100/2 A200 means that motor 0 moves to 0, motor 1 moves to 100, and motor 2 moves to 200
- For more examples, please contact us ..

Lets Bgein
Based on UDP protocol for stepper drivers and servo motor drivers, we provide powerful, flexible, and reliable motor drive control solutions for the industry, solving pain points such as poor control compatibility, fixed functions, complex wiring, external controller requirements, and complex debugging for traditional stepper motors and servo motors.
The driver and controller are integrated into one, reducing the threshold for wiring and debugging. No external controller required, no need to consider compatibility with different brands of drivers
Hardware Carrier
Function Points
Usage
Single
Multiple
Product
Perfectly combining industrial grade motion control accuracy with UDP protocol, integrating motion control algorithms, without the need for PLC, and flexibly selecting various software platforms to complete motor control.
Value
Function
- Excellent motion control performance
- Integrated motion control algorithm, supporting S/T acceleration and deceleration. Support emergency stop and deceleration stop. Supports symmetric acceleration and deceleration, as well as asymmetric acceleration and deceleration curves.
- Absolute position movement, relative position movement, Jog velocity movement, supports associative movement.
- Home limit, positive limit, negative limit, ensure mechanical protection.
- Software limit protection, event triggered stop protection, maximum speed limit.
- Support Multiple HOME Mode(reset)
- Photoelectric Sensor returns to HOME
- Absolute Encoder returns to HOME (Servo System)
- Torque return to HOME
- Skip HOME
- Customized Home
- User value: Adopt appropriate zeroing modes for different mechanical structures
- Wide Compatibility and Flexibility
- Stepper Controller ST-Series Supports a wide range of power supply voltages (24V-48V DC) and can be adapted to various sizes of 42, 57, 60, 86 stepper motors from NEMA17 to NEMA34, providing you with great project design flexibility. Covering small and medium power scenarios
- Servo Controller SV-Series: Powered by AC220V and AC110V, it can adapt to 100W, 200W, 400W, 750W, 1000W, and 1500W servo motors, providing you with great project design flexibility. Covering small and medium power scenarios
- Motion Controller MC-Series, supporting third-party drivers, motors, stepping, servo, and any power specification
- Advanced Software and Maintainability
- Support Online Upgrade, firmware upgrade can be easily completed through network interface. Get the latest features and performance optimizations without disassembling the equipment, worry free for the future.
- Powerful Software DIY function
- We provide user-friendly PC configuration software that allows users to deeply customize motor parameters (such as micro step resolution, current, acceleration curve), zeroing mode, DMX channel allocation, mode mapping, etc.
- Advanced users can perform secondary development through the provided protocol interface to achieve fully customized control logic.
- UDP protocol is fully compatible
- Fully supports UDP protocol
- Support controller hand in hand cascading, and enable routers and switches to complete larger scale cascading.
- Built in command interpreter, accepting efficient and easy UDP control commands
- A: Absolute position movement command, etg. A10000
- D: Relative negative movement command, etg. D10000
- P: Relative positive movement command, etg. P100
- T: Stop command ,etg,T0,T1
Interface
ST-Series Stepper
ST-Series Servo
MiniMum System
ST-Series Stepper
SV-Series Servo
Single Network Connection
Multi Network Connection
Specifications
Control Protocol: UDP
Motor Type: stepper motor, servo motor
Control Modes: UDP Text Command(ADP Instruction)
Communication Interface: Ethernet
Protection Function: overcurrent, overvoltage, undervoltage, short circuit protection
Working Temperature: 0~70 ° C
Cooling Method: natural cooling or forced cold air
Usage: Try to avoid dust, oil mist, and corrosive gases as much as possible
Storage temperature: -20 ° C~80 ° C
Technology
Other Information
| Number | Motor | Open | Close | Max-RPM | Torque-NM | AbsoluteEncode | Brake | In-Out | Ethernet/udp/tcp/raw | RS232/485 | FirmwareUpdate |
|---|---|---|---|---|---|---|---|---|---|---|---|
| ST-Series | Stepper | ||||||||||
| MSP-UDP-ST-42 | 42 | √ | √ | 300~1000 | 0.5 | – | √ | 4+4 | √ | √ | √ |
| MSP-UDP-ST-57 | 57 | √ | √ | 300~1000 | 2 | – | √ | 4+4 | √ | √ | √ |
| MSP-UDP-ST-60 | 60 | √ | √ | 300~1000 | 3 | – | √ | 4+4 | √ | √ | √ |
| MSP-UDP-ST-86 | 86 | √ | √ | 300~1000 | 8.5 | – | √ | 4+4 | √ | √ | √ |
| SV-Series | Servo | ||||||||||
| MSP-UDP-SV-100 | 100W | – | √ | 3000 | 0.32 | ||||||
| MSP-UDP-SV-200 | 200W | – | √ | 3000 | 0.64 | √ | √ | 4+4 | √ | √ | √ |
| MSP-UDP-SV-400 | 400W | – | √ | 3000 | 1.27 | √ | √ | 4+4 | √ | √ | √ |
| MSP-UDP-SV-750 | 750W | – | √ | 3000 | 2.39 | √ | √ | 4+4 | √ | √ | √ |
| MSP-UDP-SV-1000 | 1000W | – | √ | 3000 | 3.18 | √ | √ | 4+4 | √ | √ | √ |
| MSP-UDP-SV-1500 | 1500W | – | √ | 3000 | 4.77 | √ | √ | 4+4 | √ | √ | √ |
| MC-Series | Single Axis Controller | ||||||||||
| MSP-UDP-MC-1001 | External Drive | – | – | – | – | * | * | 4+4 | √ | √ | √ |
*Confirmation is required for value-added selection
| Parameter | MGSI | ST | SV | MC |
|---|---|---|---|---|
| Motor Dir | √ | √ | √ | √ |
| Max-Position | √ | √ | √ | √ |
| Home Speed | √ | √ | √ | √ |
| Home Offset | √ | √ | √ | √ |
| Acc and Dec Curve | S | S/T | S/T | S/T |
| Asymmetric ACC and DEC | – | √ | √ | √ |
| Maximum speed limit | √ | √ | √ | √ |
| Home Method | Limit Home | Limit Home Skip Home | Limit Home Skip Home Troque Home Absolute Home | Limit Home Skip Home Troque Home Absolute Home |
| Torque limit | – | – | √ | * |
| Error Handle | Shutdown; Restart; Reset; | Shutdown; Restart; Reset; | Shutdown; Restart; Reset; | Shutdown; Restart; Reset; |
| Positive and Negative limit alarm | √ | √ | √ | √ |
| Support External Drives | √ | – | – | √ |
| Software changes current | √ | √ | – | – |
| IO Filter | – | √ | √ | √ |
| Emergency Stop | – | IMD/DEC Stop | IMD/DEC Stop | IMD/DEC Stop |
| Sequence Home | – | √ | √ | √ |
| Delay before positive negative move | – | √ | √ | √ |
| Absolute Encoder | – | – | √ | * |
| Modbus Master | – | * | * | * |
| Online Upgrade | – | √ | √ | √ |
*is Option